

Yhteistyörobotiikka tutuksi Etelä-Pohjanmaalla
Teksti Toni Luomanmäki, Juha Hirvonen, SeAMK
Kuvat Toni Luomanmäki, Tomi Palomäki
Kolmekymmentäviisi valmistavan teollisuuden pk-yritystä osallistui yhteistyörobotiikan mahdollisuuksia esittelevään hankkeeseen. Hanke onnistui tiedonlevityksessä ja sai yrityksiltä hyvän vastaanoton.
Etelä-Pohjanmaan valmistava teollisuus koostuu pääsääntöisesti pk-yrityksistä, jotka toimivat alihankkijoina isommille yrityksille maakunnassa tai sen ulkopuolella. Alihankkijoilta edellytetään nykyisessä toimintaympäristössä joustavuutta, koska eräkoot ovat pienit ja tuotteisto laaja. Kiristyvä kilpailutilanne ja toiminnan pitäminen kannattavana asettavat alihankkijoille suuria tehokkuus- ja laatuvaatimuksia. Maakunnan valmistavassa teollisuudessa on myös omia tuotteita valmistavia yrityksiä, ja heille toimintaympäristön ennustettavuus voi olla helpompaa ja edelleen tuotannon kehittäminen pitkäjänteisempää. Toiminnan laadun, tehokkuuden ja joustavuuden kehittäminen on omia tuotteita valmistaville yrityksille kuitenkin aivan yhtä tärkeää kuin alihankkijoille.
Etelä-Pohjanmaalla robotiikkaa sovelletaan kohtalaisen hyvin. Robotti-investointi voi silti usein jäädä tekemättä, koska sitä ei nähdä kannattavana tuotannon jatkuvan muutoksen vuoksi. Perinteisen teollisuusrobotiikan luoma mielikuva robotista yhtä toimintoa toistavana resurssina on edelleen sitkeässä, mikä on toki ymmärrettävää. Yhteistyörobottien tuomat mahdollisuudet tuotannossa sekä niiden joustavuus, siirrettävyys ja uudelleenkonfiguroitavuus jäävät siis usein laskuissa huomioimatta.
Edellä mainittujen seikkojen pohjalta Seinäjoen ammattikorkeakoulussa (SeAMK) aloitettiin Etelä-Pohjanmaan liiton Euroopan aluekehitysrahastosta rahoittama Mixed Reality and Collaborative Robotics -hanke, jonka keskeinen tavoite oli lisätä alueellista tietoutta ja osaamista yhteistyörobotiikasta sekä madaltaa pk-yritysten kynnystä robotisaatioon. Hankkeessa tehtiin myös sosiaali- ja terveysalan robotiikan esiselvitys, mutta pääkohderyhmä oli teknologiateollisuuden yhteistyörobotiikkaa hyödyntävät tai sitä suunnittelevat pk-yritykset. Hankkeen keskeinen toimenpide oli rakentaa SeAMK Tekniikkaan teknologian mahdollisuuksia mahdollisimman laajasti ja joustavasti esittelevä demonstraatioympäristö. Demonstraatioympäristöön investoitiin kaksi Universal Robots -yhteistyörobottia tarttujineen, ja näille rakennettiin myös liikuteltavat pöydät. Lisäksi investoitiin Omronin mobiilirobottiin sekä monenlaisiin erilliskomponentteihin ja liitännäisteknologioihin.

Monipuolisia demonstraatioita
Koska kyse oli tiedonlevityshankkeesta, siinä toteutettiin 10 erilaista, osittain yrityksistä esiin nousseisiin tarpeisiin pohjautuvaa demonstraatiota. Niiden avulla teknologian mahdollisuuksia voitiin havainnollistaa mahdollisimman monipuolisesti. Tehdyissä esimerkkisovelluksissa esiteltiin yhteistyörobotin voima- ja momenttianturien hyödyntämistä, yhteistyörobotin ja mobiilirobotin yhteistoimintaa, neuroverkkojen soveltamista sekä teknologian itsensä toistettavuutta ja laajennettavuutta. Demonstraatioita käytettiin myös hankkeen tiedonjakotapahtumissa eri puolilla maakuntaa. Kaikista demonstraatioista on videot sivulla https://www.seamk.fi/yrityksille/tki-projektit/mixed-reality-and-collaborative-robotics/.
Yhteistyörobotin voima- ja momenttianturien hyödyntämistä esiteltiin kolmessa demonstraatiossa. Ensimmäisessä voimaohjausta käytettiin kokoonpanotehtävässä, jossa kaksi johdonsuojakatkaisijaa asennetaan DIN-kiskoon. Anturien mittaustuloksia käytettiin paikoituksessa sekä asennuksen lopputuloksen vahvistamisessa. Toisessa esimerkissä yhteistyörobotilla hiottiin materiaalitestauksen näytepalan pinta hiontalaitteessa. Robotti painoi kappaletta vakiovoimalla koko hiontasyklin ajan, ja tällä varmistettiin korkealaatuinen lopputulos. Kolmannessa demonstraatiossa yhteistyörobotti poimi ja punnitsi satunnaisessa järjestyksessä olevat kappaleet ja järjesti ne massan mukaisesti. Massa laskettiin automaattisesti voima- ja momenttianturien datasta. Voima- ja momenttianturin ominaisuuksien demonstroiminen oli tärkeää, koska teknologia tarjoaa yrityksille kustannustehokkaan ratkaisun laajentaa robotin käyttömahdollisuuksia hyvin monenlaisiin sovelluksiin. Lisäksi se tuo robotille yhden kyvyn aistia ympäristöään, jolloin tuotantoprosessin joustavuus lisääntyy merkittävästi.
Yhteistyörobotin ja mobiilirobotin yhteistoimintaa havainnollistettiin kahden esimerkkisovelluksen avulla. Ensimmäisessä yhteistyörobotti asennettiin mobiilirobotin liikuteltavaksi, jolloin saatiin kasvatettua sen toiminta-aluetta. Toisessa demonstraatiossa rakennettiin Python-sovellus, joka ohjaa laitteiden yhteistyötä. Sovellus ajaa mobiilirobottia joko viemään kappaleita kiinteille yhteistyörobottiasemille tai noutamaan niiltä kappaleita. Yhteistyörobotit taas poimivat kappaleita suoraan mobiilirobotin lavalta tai lastasivat kappaleita sinne. Nämä demonstraatiot olivat tärkeitä, koska usein mobiilirobotin tehokas soveltaminen tuotantoympäristössä edellyttää vuorovaikutusta erilaisten järjestelmien kanssa. Robotti ei välttämättä ole itsessään lisäarvoa tuottava resurssi, vaan se toimii osana kokonaisuutta, jolloin integraatiot ovat keskeinen osa järjestelmää.

Demonstraatioympäristöllä havainnollistettiin tekoälyn soveltamista käytännönläheisten ongelmien ratkaisussa kahdessa esimerkkisovelluksessa. Ensimmäisessä aiemmin esiteltyä kappaleiden punnitussovellusta kehitettiin niin, että robotti pystyi punnitsemaan kappaleen sen poiminnan yhteydessä missä tahansa orientaatiossa. Normaalisti yhteistyörobotin käsivarren tulee olla punnitustilanteessa vaakasuorassa. Tästä rajoitteesta päästiin opetetun neuroverkon avulla. Toisessa esimerkissä yhteistyörobottia hyödynnettiin mittausjärjestelyssä, jossa kerättiin neuroverkolle dataa hihnakuljettimen energiankulutuksen optimointiin. Yhteistyörobotti poimi kappaleen kuljettimen loppupäästä ja siirsi sen kuljettimen alkupäähän, jotta kappaleen kuljetukseen kulunut energia voitiin mitata kuljettimen eri nopeuksilla ja rampeilla ilman manuaalisia työvaiheita. Lopputuloksena saatiin neuroverkko, joka valitsi automaattisesti nopeuden ja rampin halutun kestoiselle kuljetustehtävälle siten, että kuljettimen energiankulutus olisi mahdollisimman pieni. Nämä esimerkkisovellukset sekä raottivat salaperäisyyden verhoa tekoälyn ympäriltä että havainnollistivat yhteistyörobotista saatavaa hyötyä datan keräämiseen vaadittavissa toistoissa.
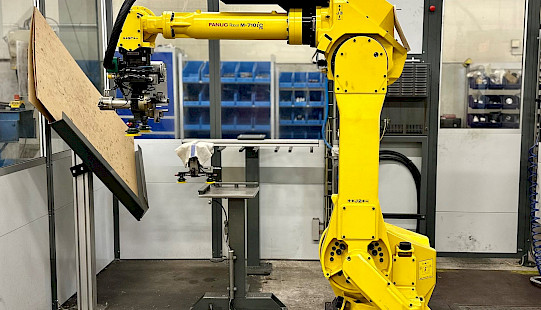
Ympäristöä hyödynnettiin myös laitteiden itsensä analysointiin ja itse tehtyjen lisäosien testaamiseen. Yhdessä demonstraatiossa tutkittiin yhteistyörobotin liikkeiden toistotarkkuutta sekä alumiinipöydän, johon robotti oli kiinnitetty, vakautta robotin liikkuessa. Toisessa demonstraatiossa robotille valmistettiin imukuppitarttuja 3D-tulostamalla ja hyödyntämällä suunnittelussa generatiivista suunnittelualgoritmia. Näin saatiin lopputuloksena mahdollisimman kevyt tarttuja, joka kuitenkin täytti lujuusvaatimukset ja huomioi muutkin reunaehdot kuten kiinnityspaikkojen sijainnin. Laitteistosta tehtiin myös digitaalinen kaksonen ja VR-malli, jota hyödynnettiin levyntaittosovelluksen automatisoinnin suunnittelussa ja virtuaalisessa käyttöönotossa.

Onnistuneet tulokset
Hankkeeseen osallistui 35 yritystä, ja se sai osallistujilta hyvän vastaanoton. Yrityksille hanke tarjosi matalan kynnyksen mahdollisuuden tutustua yhteistyörobottiteknologiaan hyvin monipuolisesti ja mahdollisti omien kehitystoimien käynnistämisen. Hankkeessa toteutetut pop-up-tapahtumat tavoittivat yli 100 vierailijaa ja työpajoihin osallistui kymmeniä eri yrityksiä. Demonstraatioympäristö edesauttoi jalkauttamaan yhteistyörobotiikkaa ja sen liitännäisteknologioita maakunnan pk-yritysten tuotantoympäristöihin. Lisäksi SeAMK Tekniikan oman henkilökunnan osaaminen kasvoi hanketta tehdessä, ja demonstraatioita voidaan hyödyntää laajasti myös opetuksessa. Opiskelijoiden kautta tietous yhteistyörobotiikasta ja sen mahdollisuuksista leviää näin tehokkaasti yritysmaailmaan. Hankkeessa rakennettu demonstraatioympäristö tulee lisäksi toimimaan hyvänä pohjana tuleviin yhteistyörobotiikkaa hyödyntäviin hankkeisiin. Kokonaisuutena hanke saavutti tavoitteensa kasvattamalla merkittävästi alueellista yhteistyörobotiikan osaamista sekä luomalla edellytykset tulevaisuuden kehitys- ja yritysyhteistyölle teknologian puitteissa.
Jaa tämä artikkeli
Sinua voisi kiinnostaa myös


Robotiikkayhdistyksen kesäpäivät 2024
Robottihitsauksen huippuosaamista Savosta Robotiikkayhdistyksen 2024 vuoden kesäpäivän teemana oli tehokas robottihitsaus ja sen ohjelmointimenetelmät. Paikaksi valikoitui Vieremä, jossa aihepiiriin tutustuttiin seminaarin ja yritysvierailujen merkeissä. Mielenkiintoisen päivän sisältö purettiin vielä savusaunan lauteilla.
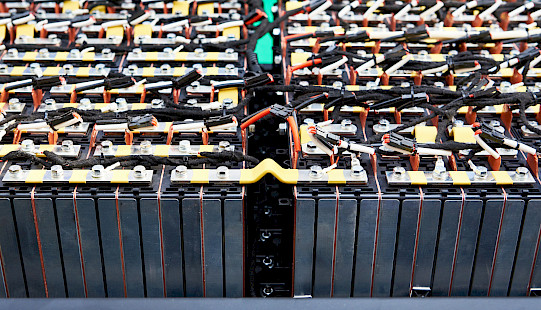
Käytetyt sähköautojen akut materiaaliksi ja energiavarastoiksi
Kiertotalous vaatii uudenlaisia automaatioratkaisuja käytöstä poistettujen tuotteiden purkamiseen ja lajitteluun niiden elinkaaren loppuvaiheessa. Useissa tuotteissa energiavarastona oleva akusto sisältää arvokkaita materiaaleja, jotka voidaan uusiokäyttää, vaikka tuote muuten olisi muuten käyttökelvoton.